Athena
2013
Stats
| Record | 52-14-01 |
|---|---|
| MAR Rank | 1 |
| Drive Team | Josh Falk, Antonio Papa, Dan Gavrushenko |
| Awards | FIRST World Championship - Archimedes Division Quarterfinalist Mid-Atlantic Region Championship Winners Mid-Atlantic Region Engineering Excellence Award Hatboro-Horsham District Winners Hatboro-Horsham Quality Award TCNJ District Chairman's Award TCNJ District Finalist |
Team Nemesis is back at it again, but this time, we did things a little differently. For the first time in Nemesis history, the team used CAD software to help design every part and subsystem integration. With the help of new sponsors and a personal CNC mill, we were able to use nearly all custom parts, and to top it all off, we had time for a quick powder coating!
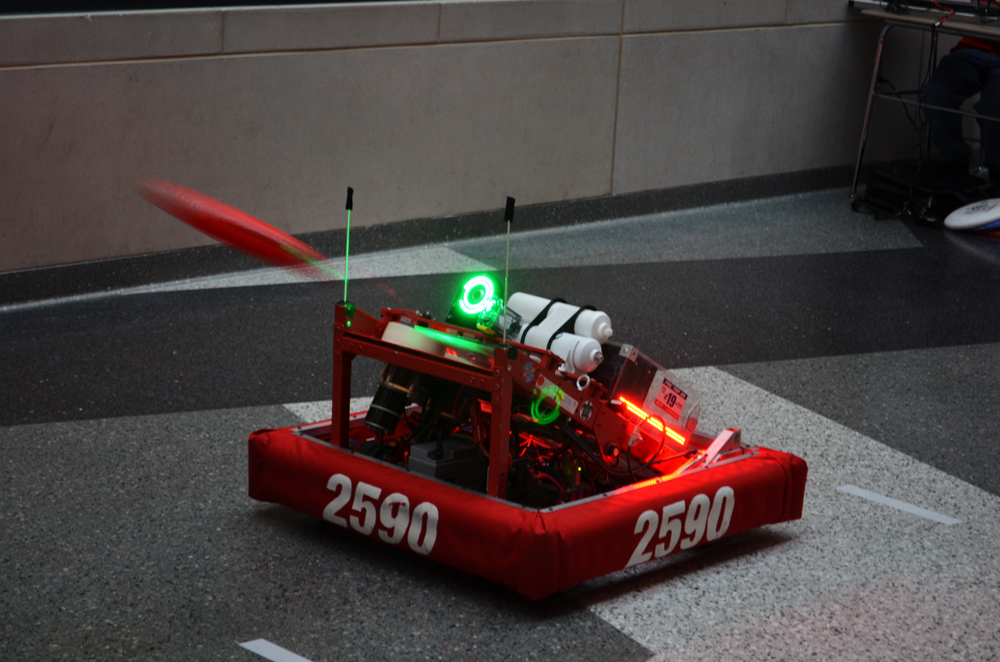
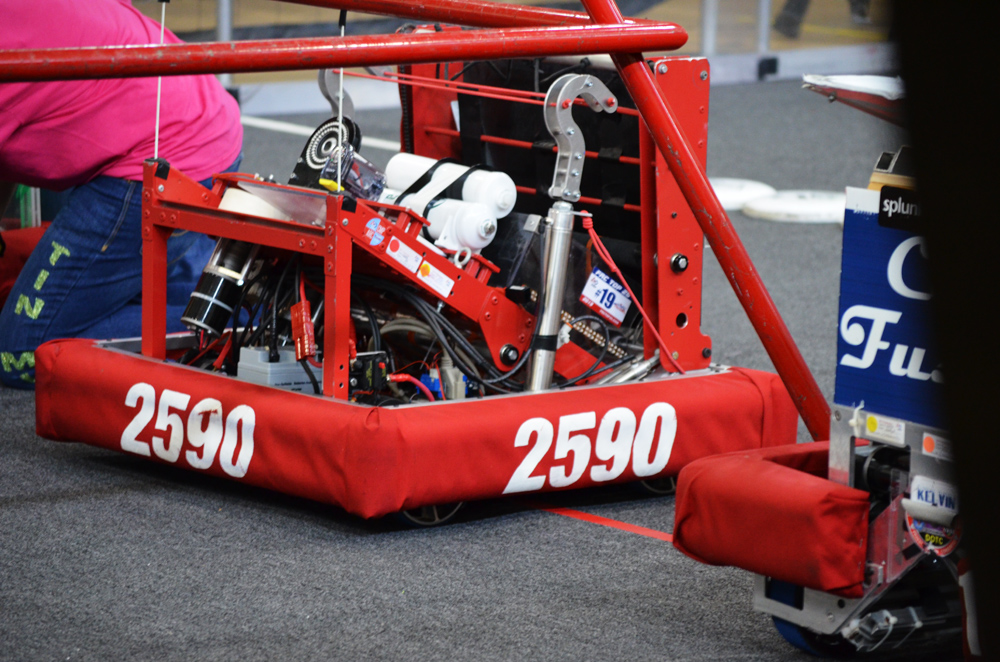
After a long and very busy six weeks, Nemesis proudly presents their 2013 robot,Athena. Athena was designed to be simple and effective. She is comprised of a strong drivesystem, reliable floor intake, simple hopper, accurate shooter, fast climber, and an intelligentcontrol system.
The drivetrain is powered by two modified VEXPro ball shifters, run by two CIM motors each. Capable of 5 feet per second for fine adjustments and pushing matches and 15 feet per second for cross-field runs and high agility. Shifting is controlled by pneumatic pistons for seamless transition between gear states.
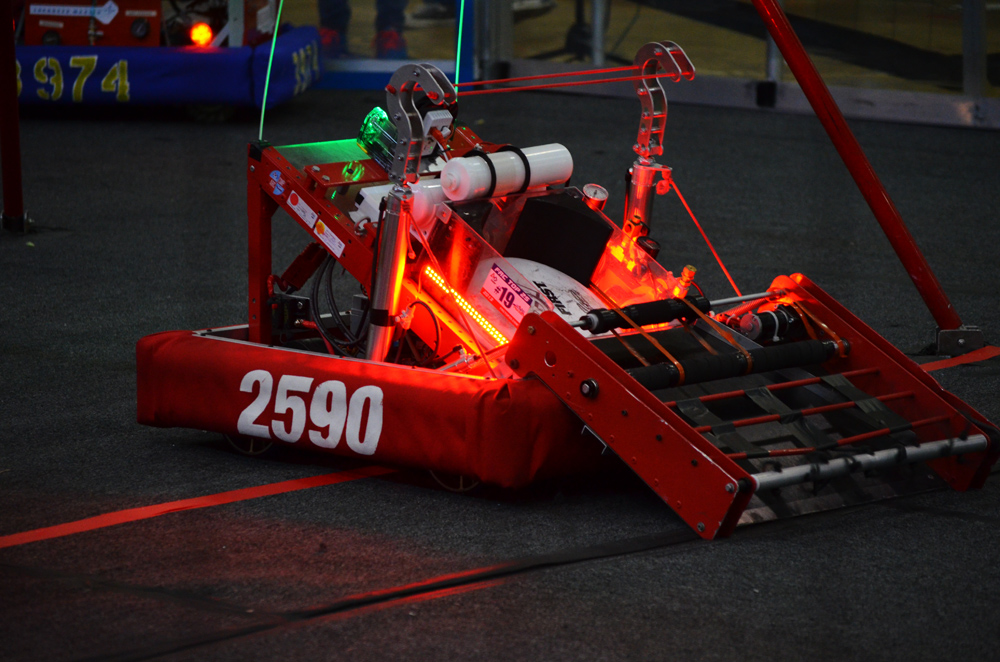
Athena’s intake is an over-the-bumper style intake, inspired by Team 341, Miss Daisy’s 2012 robot. Actuated by two pneumatic pistons and powered by a single BAG motor, the intake glides just above the playing field, sweeping up discs with ease. For easy alignment, the initial opening is 20.5 inches wide, and discs are sorted into the hopper.
The hopper is designed to hold discs, disregarding orientation, and consistently feed discs into the shooter. Along the bottom of the hopper, flat bands, powered by a BAG motor, push discs through a slot and into the shooter. Athena is capable of holding four discs for maximum shooting time.
Powered by two direct-drive mini-CIMs, Athena’s shooter rarely misses a shot. The two shooter wheels are nitrile drive rollers which expand from four to six inches for compression on the discs. Static at a fixed 30 degrees, the shooter is optimized for shooting from a few specific locations.
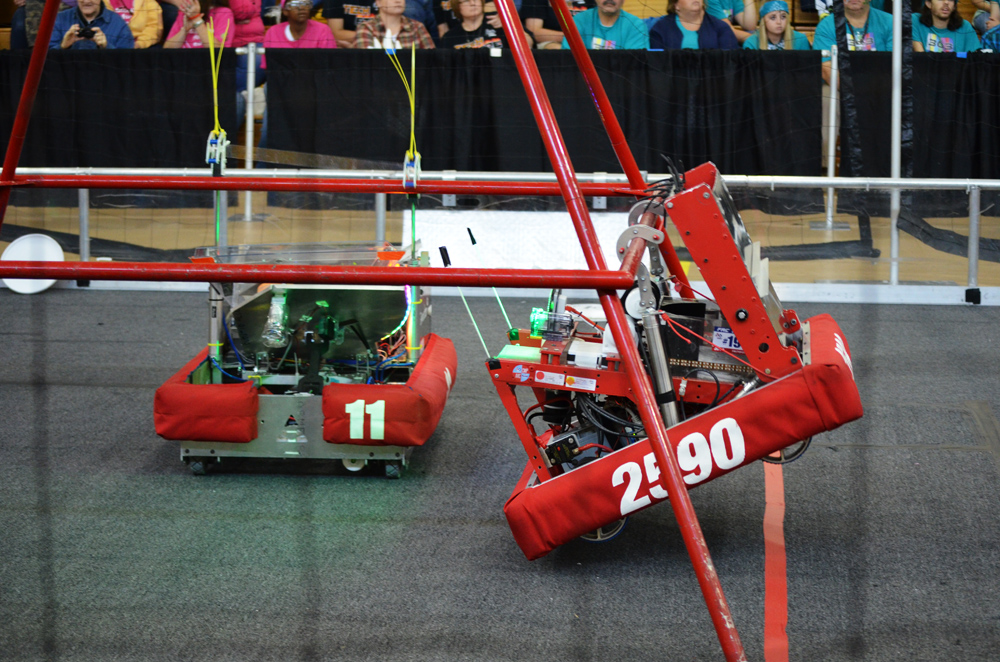
A simple 10 point hanging mechanism consists of two pneumatic pistons with custom hooks attached. To allow for easy driver alignment, the pistons are attached to custom one-way pivot mounts. Hanging process and alignment takes about one second.
Complementing Athena’s simple features is her complex yet effective control system, including encoders, IR sensors, vision processing, and autonomous scripting. Mounted above the shooter, camera data is used to determine shooter wheel speed and aid in turning to target. Encoders and IR sensors help determine actual wheel speeds, distance traveled and disc orientation/position. Autonomous scripting based off of Team 33, The Killer Bee’s code allows fast and easy autonomous changes.
Finishing the build aspect of this year’s robot a few days before bag, autonomous routines are implemented and perfected, driver practice continues, and no one is Swiss-cheesing parts for weight! Team Nemesis is excited for this year’s competition season and is looking forward to its events at Hatboro-Horsham, TCNJ, and hopefully MAR Championships and World Championships.
Athena won the Hatboro Horsham District, 2nd place at The College of New Jersey District, won the Mid Atlantic Region Championship, and quarter finals at Archimedes in World Championships in St. Louis.
The Challenge
Ultimate Ascent
To win Ultimate Ascent, teams must construct a robot that can shoot discs, and climb a tower. ULTIMATE ASCENT is played by two alliances, with three teams each. Discs can be shot into four different goals, on their side of the field, from anywhere on the field. The goals are at three different heights. The highest goal is worth 3 points, the middle two goals are worth 2 points, and the lowest goal is worth 1 point. There is also one more goal, which is at the top of the pyramid. Each point scored in that goal is worth 5 points. While teams are commandeering their robots to victory, launching discs into the goals, the other alliance can block your team's robot from scoring, as long as your robot is not being fed discs from the human player.
The first 15 seconds of the match starts off with an autonomous period, when the robots run on their own, with no human interaction. The robots can start off with a maximum of 3 discs and must be touching their alliance's pyramid. The rest of the match is teleoperated, which is when the teams remotely-control their robots. When the end of the match arrives, robots can be driven to their pyramids and try to climb it. The top tier is worth 30 points, middle is worth 20, and the lowest level is worth 10 points.