Gaia
2019
Stats
| Record | 47-30-01 |
|---|---|
| MAR Rank | 17 |
| Drive Team | Alex Keller, Harsh Padhye, Richa Mandrekar, Rahul Sawant, Gurveer Grewal |
| Awards | Mount Olive District Semifinalist Mount Olive District Entrepreneurship Award Central New York Regional Semifinalist Central New York Regional Entrepreneurship Award Bensalem District Winner Bensalem District Entrepreneurship Award FIRST Mid-Atlantic District Championship Quarterfinalist FIRST World Championship - Carson Division Quarterfinalist |
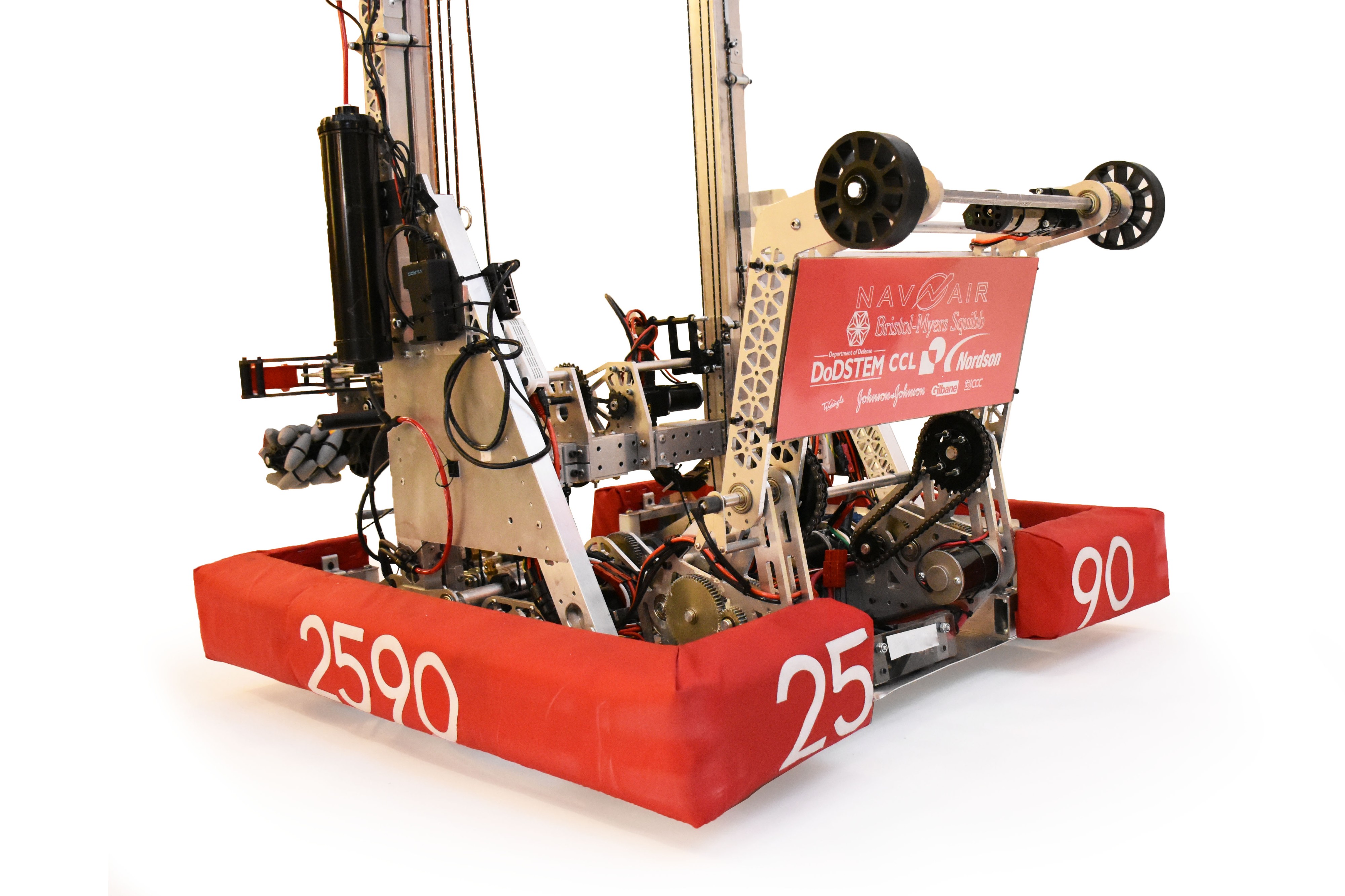
Team 2590 Nemesis is proud to present our 2019 Robot “Gaia”
Check out our Chairman's Video!
Gaia’s singular cascading elevating sports an arm capable of manipulating cargo and hatch panels. The elevator is capable of going through the robot, with an assisting arm that allows the robot to reach the Level 3 HAB
Gaia’s six-wheel West Coast drivetrain allows for swift maneuverability around the field. She can reach a top speed of 16 ft/s in high gear and 6 ft/s in low gear. While in high gear, the robot quickly traverses the field. Gaia places game pieces more effectively in low gear due to the opportunity for fine directional adjustments.
Gaia’s two-stage continuous elevator lifts the carriage to a maximum height of 84 inches, allowing for cargo and hatch placement on both the cargo ship and all three levels of the rocket. Powered by a single NEO motor with a 7.4:1 ratio, the elevator rises to its maximum height in approximately 2.67 seconds.
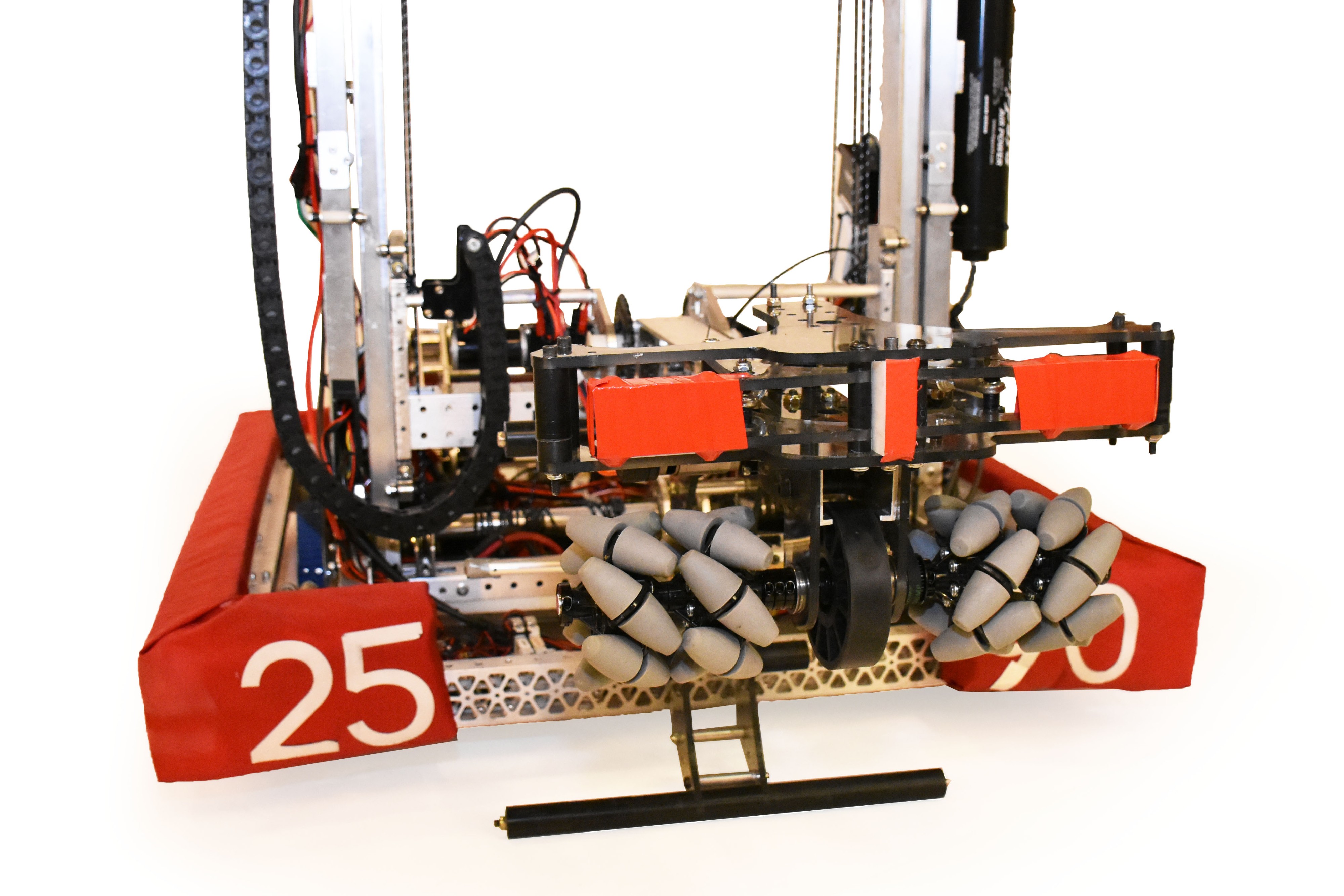
The carriage is Gaia’s scoring mechanism, containing both the cargo and hatch manipulators. The hatch manipulator is composed of two small arms controlled by pistons, which facilitates retrieval from the human player station. The C-shaped cargo manipulator, situated underneath the hatch manipulator, maintains a firm grip on the cargo. Mecanum wheels are used to center the cargo into the middle of the manipulator to increase surface area for intake. The entire carriage system articulates 180 degrees into the robot to comply with pre-match frame perimeters and supports defensive play.
In the final thirty seconds of the match, Gaia’s inner stage of the continuous elevator drops down to lift her up to Habitat Levels 2 and 3. The carriage moves upward and locks onto the hooks on top of the inner stage of the elevator. The inner stage is pushed downward through the cutout in the belly pan. A dual-wheel arm geared to lift 250 pounds rests on the HAB to act as a counterbalance. Once above the level, the Stealth wheels on the ends of the arm pull Gaia forward until the drivetrain makes contact with the HAB and the center of mass is on the chosen level.
Written by Rahul Sawant
The Challenge
Destination: Deep Space
Destination: Deep Space is the game for the 2019 FIRST Robotics Competition. The game involves two alliances of three teams each competing to place hatch panels and rubber balls or “cargo” on rockets and cargo ships before returning to their hab platform to climb at the end of the match.