Bellerophon
2014
Stats
| Record | 59-17-00 |
|---|---|
| MAR Rank | 1 |
| Drive Team | Josh Falk, Antonio Papa, Christian Gavalchin |
| Awards | Hatboro-Horsham District Winner Hatboro-Horsham Entrepreneurship Award Lenape-Seneca District Finalist Lenape-Seneca District Chairman's Award Mid-Atlantic Robotics FRC Region Champions Mid-Atlantic Robotics FRC Region Championship Industrial Design Award FIRST World Championship - Archimedes Division Champions FIRST World Championship - Archimedes Division Entrepreneurship Award FIRST World Championship - Einstein Field Semifinalist |
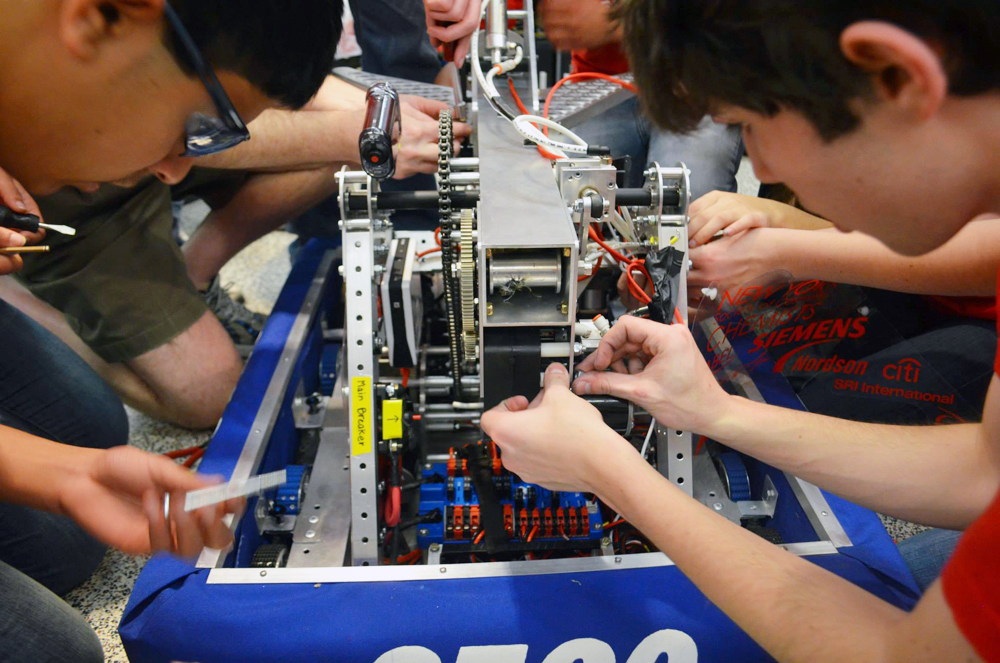
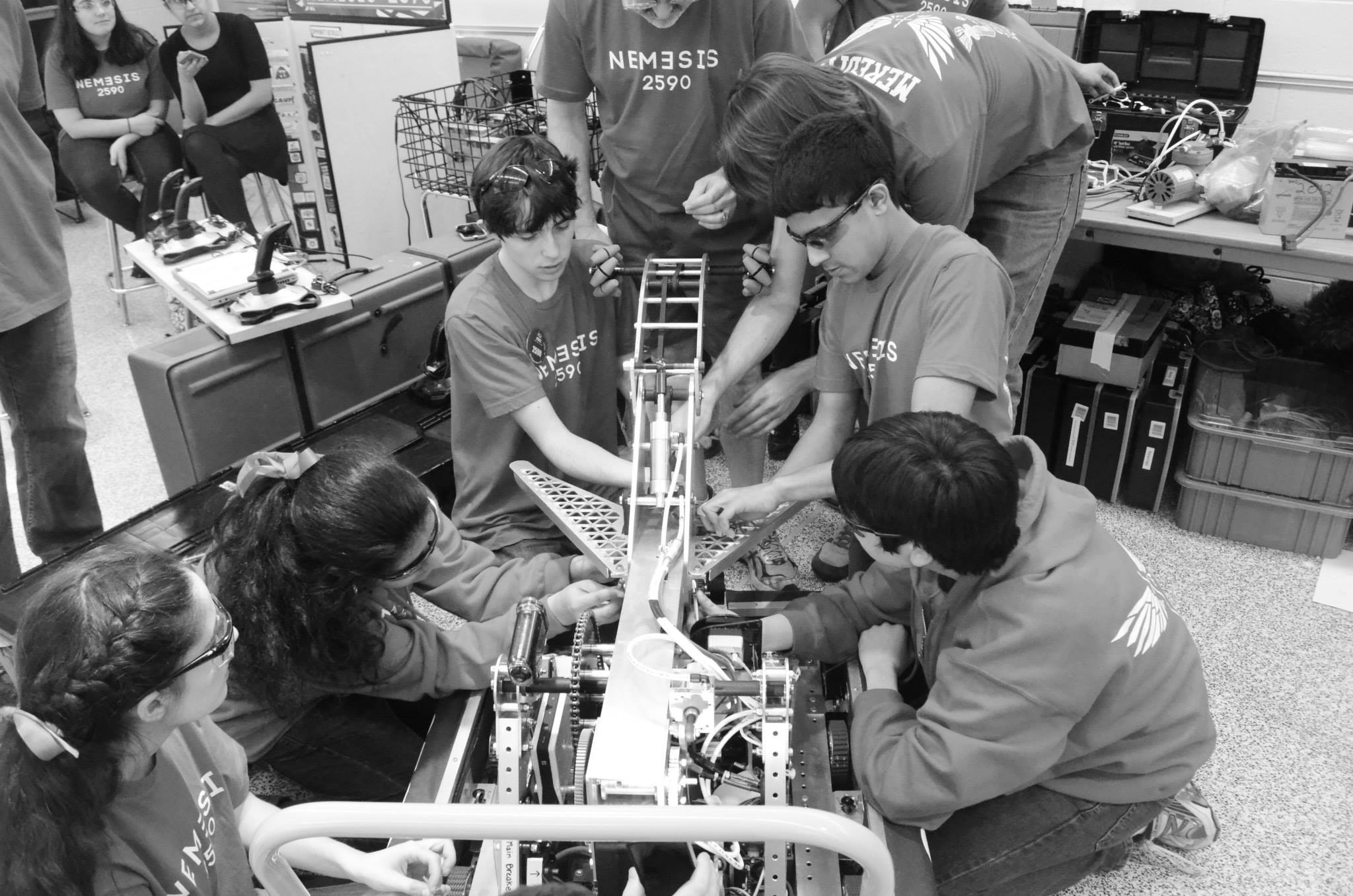
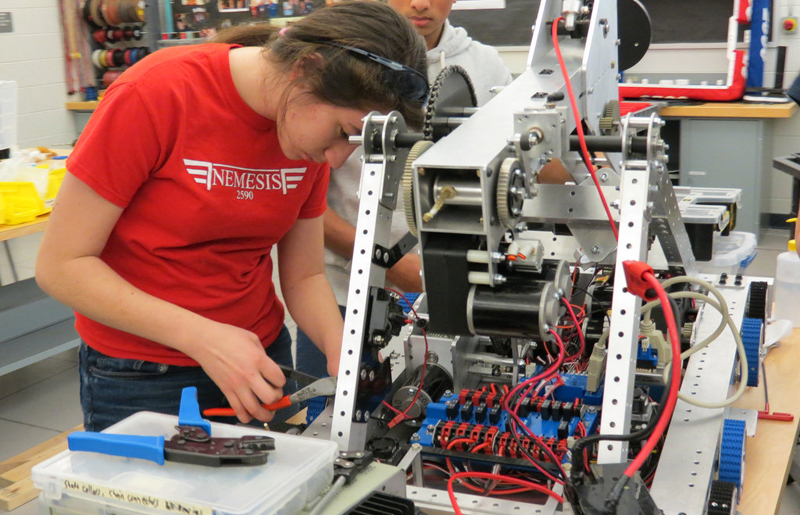
Bellerophon features an articulating claw and linear shooter inspired by Team 1114, Simbotics’ 2008 robot and Team 233, The Pink Team’s 2008 robot. The claw lowers to floor height to collect balls from the field and lifts up to shoot into the goal or over the truss. A custom worm gearbox powered by a miniCIM controls the claw’s angle, counterbalanced with a gas shock. The adjustable angle gives Nemesis large strategic versatility and allows Bellerophon to fit on any alliance.
The mecanum wheels on the claw center the ball and allow Nemesis to grab game pieces while off-angle. The claw tightly grips the ball and opens up when shooting. The shooter is powered by four six-inch extension springs. A modified VEXPro ball shifter with a neutral gear winds the shooter back while a ratchet and pawl prevents backdrive.
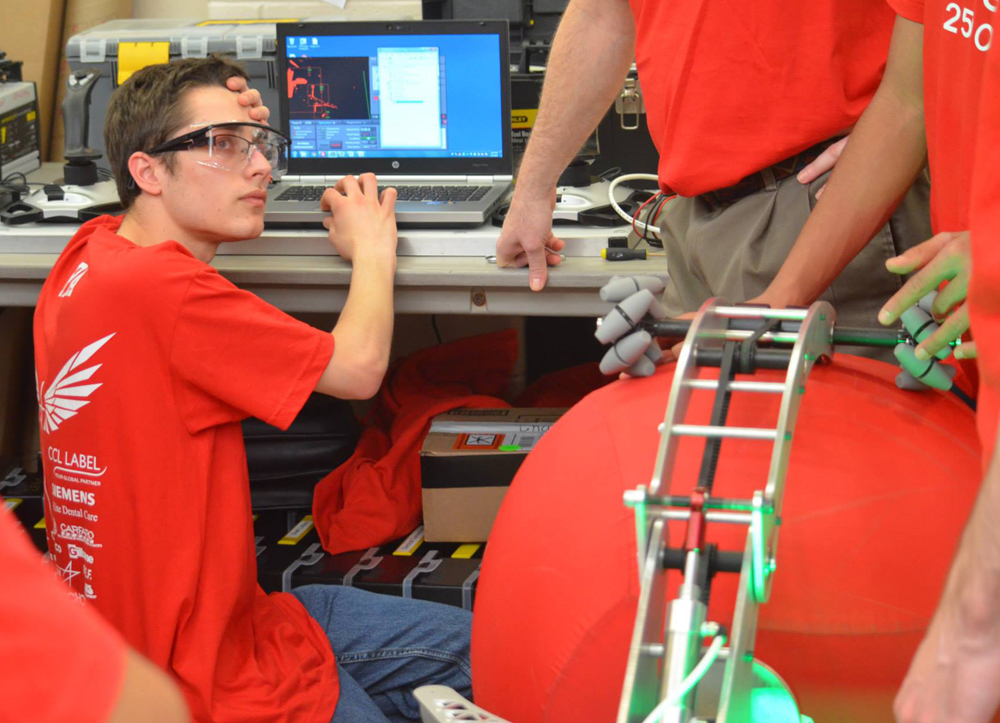
The arm’s angle can be controlled by a camera recognizing the vision target and calculates the robot’s distance to the goal. This allows Bellerophon to automatically adjust its angle to consistently score. Bellerophon also uses the camera and vision processing to find the hot goal in autonomous.
Autonomous scripting based off of Team 33, The Killer Bee’s code allows fast and easy autonomous changes. Bellerophon reads a text file on the robot’s computer and executes its commands. The robot’s two ball autonomous routine has been tuned to perfection thanks to this asset.
Bellerophon won the Hatboro-Horsham District and Nemesis looks forward to competing at the Lenape-Seneca District and the MAR Championship.
The Challenge
Aerial Assist
Aerial Assist℠ is played by two competing Alliances of three robots each on a flat 25’ x 54’ foot field, straddled by a truss suspended just over five feet above the floor. The objective is to score as many balls in goals as possible during a two (2)-minute and 30-second match. The more Alliances score their ball in their goals, and the more they work together to do it, the more points their Alliance receives.
The match begins with one 10-second Autonomous Period in which robots operate without the control of a driver. Each robot may begin with a ball and attempt to score it in a goal. Alliances earn bonus points for scoring balls in this mode. Additionally, each high/low pair of goals will be designated “hot” for five seconds, but the order of which side is first is randomized. For each ball scored in a “hot” goal, the Alliance earns additional bonus points.
For the rest of the match, drivers remotely control robots from behind a protective wall. Once all balls in autonomous are scored, only one ball is re-entered in to play, and the Alliances must cycle a single ball as many times as possible for the remainder of the match. With the single ball, they try to maximize their points earned by throwing balls over the truss, catching balls launched over the truss, and scoring in the high and low goals on the far side of the field. Alliances receive large bonuses for “assists,” which are earned for each robot that has possession of the ball in a zone as the ball moves down the field. Read More